ROS (Robot Operating System) è un progetto open source che fornisce un framework e strumenti per applicazioni di robotica. Aiuta a progettare software complessi senza sapere come funzionano determinati hardware.
Noetico è una versione LTS di ROS e su misura per Ubuntu 20.04. Il supporto ROS Noetic è fino al 2025 (5 anni). Le architetture supportate sono amd64, armhf e arm64.
In questo tutorial, illustreremo come installare ROS Noetic su Ubuntu 20.04 .
1. Aggiungi repository Noetic ufficiale a Ubuntu
Il primo passo nell'installazione di ROS Noetic è aggiungere il repository ufficiale di ROS Noetic al file di elenco dei sorgenti di Ubuntu 20.04.
Per aggiungere un repository Noetic, digita:
$ echo "deb http://packages.ros.org/ros/ubuntu focal main" | sudo tee /etc/apt/sources.list.d/ros-focal.listUscita:
deb http://packages.ros.org/ros/ubuntu focal main.2. Aggiungi portachiavi ROS ufficiale
Quindi, aggiungi il portachiavi ROS ufficiale al tuo sistema Ubuntu 20.04. Ci sono due modi per farlo.
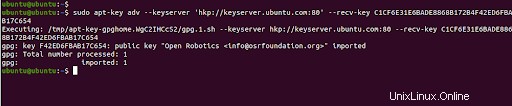
Il primo metodo consiste nell'usare hkp://keyserver.ubuntu.com:80 Server chiave Ubuntu. Se non funziona, puoi provare a sostituirlo con hkp://pgp.mit.edu:80 . Quindi, esegui il comando seguente.
$ sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
Il secondo metodo consiste nell'usare il comando curl per scaricare il portachiavi ROS ufficiale e aggiungerlo localmente.
$ curl -sSL 'http://keyserver.ubuntu.com/pks/lookup?op=get&search=0xC1CF6E31E6BADE8868B172B4F42ED6FBAB17C654' | sudo apt-key add -L'output "OK", significa che la chiave è stata aggiunta con successo.
3. Aggiorna l'indice del pacchetto ROS
Successivamente, aggiorneremo il nostro sistema Ubuntu in modo da ottenere le informazioni sul pacchetto ROS Noetic dal repository.
$ sudo apt updateQuesto sincronizzerà il repository appena aggiunto con i repository Ubuntu online.
4. Installa ROS Noetic su Ubuntu 20.04
ROS ha diversi metapacchetti che puoi scegliere di installare in base alle tue esigenze specifiche.
I seguenti sono i metapacchetti ufficiali di ROS Noetic:
- ros-noetic-desktop-full
- desktop-ros-noetic
- ros-noetic-ros-base
- Ros-noetic-ros-core
Scegli il tuo metapacchetto preferito e installa con uno dei comandi seguenti.
Installa ros-noetic-desktop-full
Il pacchetto ros-noetic-desktop-full viene fornito con tutti i pacchetti in ros-noetic-desktop e anche i pacchetti di percezione (ros-noetic-perception) e simulazione (ros-noetic-simulators).
Per installare ros-noetic-desktop-full, esegui il seguente comando:
$ sudo apt install ros-noetic-desktop-fullDopo aver eseguito il comando, premi Y per procedere con l'installazione.
Installa ros-noetic-desktop
Ros-noetic-desktop è una versione minima di ros-noetic-desktop-full. Contiene la maggior parte dei pacchetti di tutorial tra cui:
- vis
- angoli
- tutorial_comuni
- tutorial_geometria
- ros_tutorials
- Roslint
- urdf_tutorial
- tutorial_visualizzazione
Per installare ros-noetic-desktop, esegui il seguente comando:
$ sudo apt install ros-noetic-desktopInstalla ros-noetic-base
La base ros-noetic contiene solo pacchetti di base. Include i pacchetti in ros_core e altri strumenti di base non robotici come la riconfigurazione dinamica, i nodelet e actionlib.
Per installare ros-noetic-base, esegui il seguente comando:
$ sudo apt install ros-noetic-baseInstalla ros-noetic-core
Il ros-noetic-core contiene una raccolta dei pacchetti minimi. I pacchetti includono:
- msg_comuni
- gencpp
- genere
- genlisp
- genmsg
- gennodejs
- genpy
- generazione_messaggio
- messaggio_runtime
- libreria plugin
- ro
- comm_ros
- regola_rosbag_migrazione
- Rosconsole
Per installare ros-noetic-core, esegui il comando seguente:
$ sudo apt install ros-noetic-core5. Configura l'ambiente ROS Noetic
Il prossimo passo è impostare l'ambiente ROS Noetic. Per prima cosa procurati lo script setup.bash in ogni terminale bash che usa ROS, digita:
$ source /opt/ros/noetic/setup.bashAggiungi il file .bashrc che si trova nella tua home directory per evitare l'esecuzione ogni volta che avvii una nuova shell:
$ echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrcVerifica eseguendo il comando seguente:
$ tail ~/.bashrc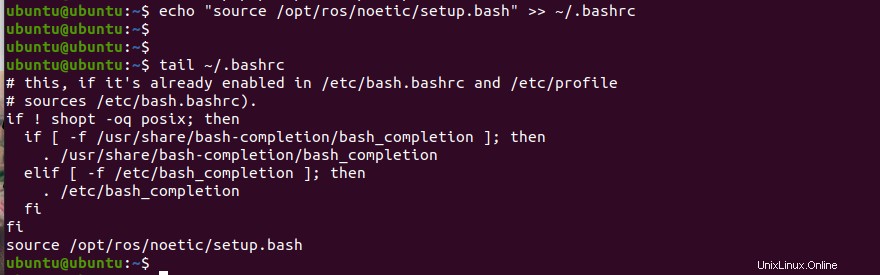
Per rendere effettive le modifiche, digita:
$ source ~/.bashrc Verifica installazione Noetic
Dopo aver installato con successo ROS Noetic su Ubuntu 20.04, esegui semplicemente il comando roscd.
$ roscdNoterai che la directory corrente del tuo prompt cambia in /opt/ros/noetic , dove abbiamo installato Noetic.

Possiamo anche verificare l'installazione eseguendo roscore comando nella directory noetica. L'output mostra la distribuzione ros e la versione ros nel riepilogo.
$ roscore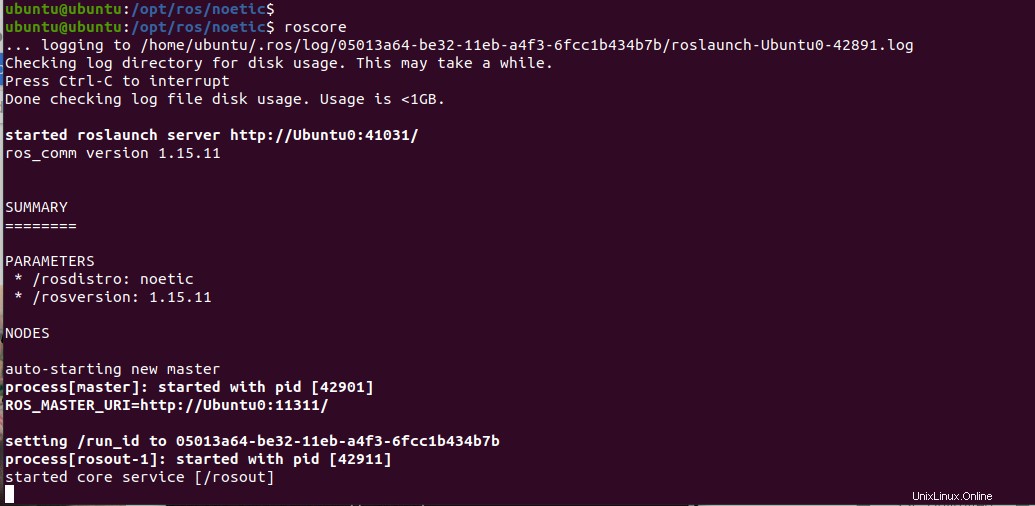
Conclusione
In questo tutorial abbiamo imparato come installare ROS Noetic su Ubuntu 20.04. Ora puoi programmare i tuoi robot utilizzando Noetic.