Linux è arricchito con un sacco di software per droni e robot. Questo settore è interamente legato all'Intelligenza Artificiale e al Machine Learning, che richiedono un diverso tipo di competenza e creatività. Da quando è emersa la nuova era della tecnologia, ha iniziato a essere una parte vitale soprattutto nell'area della ricerca scientifica. Inoltre, questo genere di cose non è economico da costruire e controllare. Quindi, decidere su un particolare prodotto è abbastanza strano, anche se hai esperienza in questo settore.
Il miglior software per droni e robot
Oggi discuteremo e ti faremo conoscere il miglior software per robot e droni nel sistema Linux. Abbiamo cercato di scegliere l'applicazione più versatile e facile da usare per te. Ne troverai alcuni gratuitamente e alcuni sono costosi. Quindi, passiamo attraverso il punto centrale qui sotto!
1. Gazebo
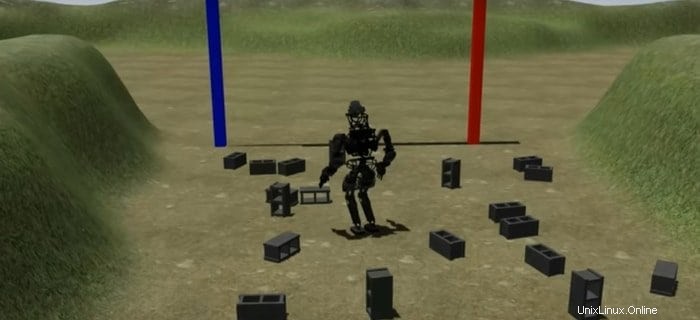
Gazebo è uno dei software per robot più popolari ed essenziali, abbastanza esperto da testare algoritmi, progettare robot e addestrare il sistema di intelligenza artificiale (AI). Ha lo scopo di fornire le strutture per quanto riguarda gli scenari reali. Prima di essere un progetto indipendente, era una componente vitale nel Progetto Giocatore (incluso anche in questo contenuto, vedi sotto).
Caratteristiche degne di nota di Gazebo
- Gazebo è un simulatore ben progettato in grado di simulare più robot in un ambiente 3D.
- Ti consente di accedere a diversi motori fisici come Bullet, ODE, DART e altri per prestazioni migliori.
- Otterrai molti robot predefiniti come iRobot Create, PR2, Pioneer2 DX e altri con Gazebo.
- Gli utenti possono sviluppare plug-in personalizzati per migliorare la capacità di robot e sensori che possono accedere direttamente all'API di Gazebo.
- Utilizzando il formato XML-SDF, puoi costruire il tuo robot personalizzato e descriverne anche gli aspetti.
- Fornisce un forte supporto con utili tutorial che coprono i concetti in dettaglio, insieme a molti esercizi pratici.
2. ArduPilot
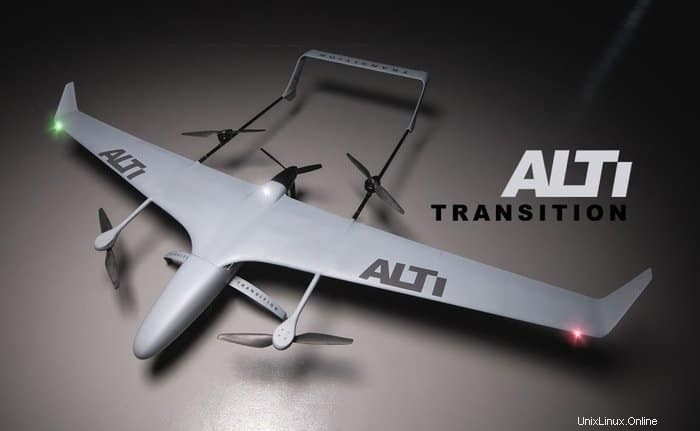
ArduPilot viene fornito con il software per robot e droni più potente e avanzato scritto nei linguaggi C++ e Python. Con avanzate tecnologie di registrazione dei dati e simulazione, è già stato installato in più di un milione di veicoli. Questa piattaforma avanzata è concessa in licenza ai sensi della GNU General Public License (v3) ed è anche gratuita.

Caratteristiche degne di nota di ArduPilot
- Mira a controllare qualsiasi sistema di veicoli, inclusi molti strumenti emergenti come quad-planes, elicotteri composti, multirotore e persino sottomarini.
- Adatto a molte aziende UAV OEM come jDrones, AgEagle, Kespry e altre.
- ArduPilot funziona su più piattaforme, tra cui Linux e Microsoft Windows.
- Fornisce un forte supporto tramite Forum, Github e Facebook. Inoltre, otterrai una ricca documentazione con questo strumento.
- Inoltre, supporta un'ampia gamma di componenti hardware, tra cui Copter, Rover e diversi hardware embedded.
3. BetaFlight
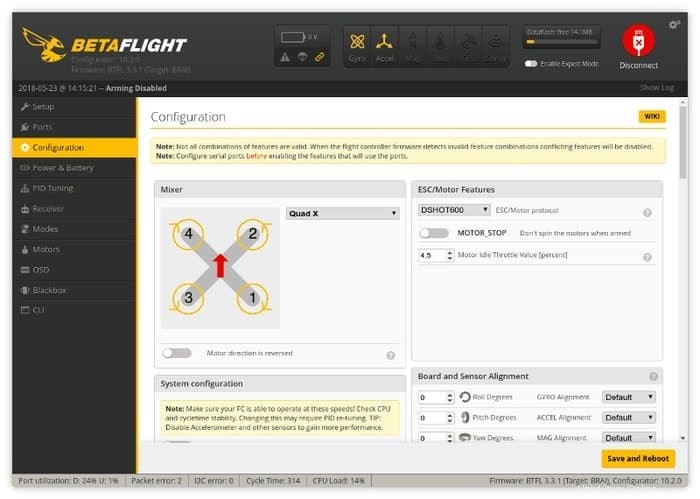
BetaFlight viene fornito con un software per droni open source che mira a fornire migliori prestazioni di volo e supporto. Offre la migliore esperienza con funzionalità aggiornate e un processo di garanzia della qualità. Inoltre, ha una serie di funzioni di sicurezza che aiutano a prevenire comportamenti pericolosi dei droni. Hai il pieno controllo per affrontare la situazione se qualcosa va storto.
Caratteristiche degne di nota di Volo pulito
- Compatibile con la maggior parte dei produttori di telecomandi, inclusi FlySky, Graupner e FrSky.
- Utilizzando il controller di volo, puoi controllare VTX e anche le impostazioni della fotocamera.
- Fornisce un solido e dedicato supporto alla community. Inoltre, riceverai l'aiuto per iniziare a utilizzare il suo tutorial video.
- BetaFlight funziona su più piattaforme, tra cui Microsoft Windows, Linux e Mac OS.
4. Banco di lavoro della visione della NASA
NASA Vision Workbench è un data open source e la libreria di elaborazione delle immagini mira a fornire varie attività di elaborazione delle immagini. Con questo strumento puoi lavorare su analisi scientifiche e ingegneristiche automatizzate, elaborazione estesa di immagini satellitari, percezione dei robot e altro ancora. Inoltre, fornisce supporto per operazioni a livello di blocco su diverse immagini di progetto.
Caratteristiche degne di nota di NASA Vision Workbench
- Utilizzando librerie di terze parti, ha la capacità di leggere e scrivere file JPEG, PNG, PDS e TIFF.
- Fornisce un sistema intuitivo e flessibile che aiuta a distribuire diverse applicazioni di visione artificiale.
- Oltre ad essere uno strumento di elaborazione generico e un framework di visione artificiale, consente anche di ottenere strutture di ricostruzione dell'ambiente 2D e 3D.
- Fornisce un eccellente supporto per il debug, il sistema dei tipi e la cache.
- Inoltre, consente diversi tipi di trasformazioni dell'immagine, tra cui rotazione, ricampionamento, traduzione e avvolgimenti arbitrari.
5. Il Progetto Giocatore
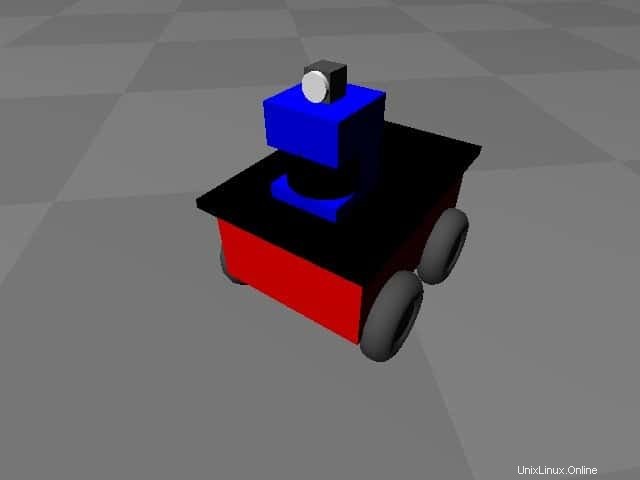
Il Player Project è uno degli strumenti più popolari che aiutano a creare software per robot. Lo scopo principale di questo software è ricercare sistemi di robot e sensori. È un'applicazione open source rilasciata sotto la GNU General Public License. Puoi usarlo su una vasta gamma di hardware, tra cui Khephera di K-Team, Obot d100 di Botrics, Garcia di Acroname e molti altri.
Caratteristiche degne di nota di The Player Project
- Il Player Project fornisce un'interfaccia minima e flessibile rispetto ad altri strumenti robotici.
- È un dispositivo server multipiattaforma che funziona su Windows, Linux, BSD, Mac OS X e Solaris.
- Gli utenti possono controllare robot e sensori con l'aiuto di interfacce giocatore standard.
- Supporta diversi linguaggi di programmazione, tra cui C, C++, Python, Ruby, Java e Tcl.
- Utilizzando The Player Project, puoi eseguire gli esperimenti sui robot simulati e pubblicarli su importanti riviste di robotica.
- Fornisce una documentazione chiara con un utile manuale utente in modo che gli utenti possano utilizzare al meglio questo strumento.
6. PX4
Ancora una volta, PX4 viene fornito con un software di controllo del volo moderno e intuitivo, che fa parte di Dronecode. Come sappiamo, Dronecode è una delle organizzazioni no profit più apprezzate e conosciute che si occupano di veicoli volanti. Questa piattaforma open source è realizzata con il linguaggio di programmazione C++ con licenza BSD-3-Clause. È stato sviluppato dall'ETH di Zurigo (noto come Swiss Federal Institute of Technology).
Caratteristiche degne di nota di PX4
- PX4 contiene un'architettura modulare ed estensibile che mira a essere utilizzata in diversi tipi di veicoli.
- Fornisce modalità di volo flessibili e potenti con strumenti di sviluppo complementari.
- Puoi utilizzare PX4 gratuitamente e modificarlo in base alle tue esigenze.
- Ti permette di ospitare MAVLink e MADSDK e QGroundControl.
- Può essere utilizzato sia in droni di consumo, applicazioni industriali e anche in varie piattaforme di ricerca.
- Fornisce una documentazione utente essenziale e utile per consentire agli utenti di ottenere una chiara panoramica del software.
7. DART
DART fa riferimento a una libreria open source che si esprime come Dynamic Animation and Robotics Toolkit. Il Graphics Lab e Humanoid Robotics Lab del Georgia Institute of Technology hanno creato questo progetto. È una piattaforma collaborativa con licenza BSD e scritta nel linguaggio di programmazione C++. Otterrai gratuitamente molte funzionalità con questo software per robot che possono aiutarti a portare il tuo progetto di robot un passo avanti.
Caratteristiche degne di nota di DART
- Otterrai un'API estensibile per interfacciarti con la programmazione non lineare e l'ottimizzazione multi-obiettivo.
- Supporta diversi rilevatori di collisioni, inclusi Bullet, ODE e FCL.
- Ti consente di calcolare la distanza minima e anche di accedere agli stati cinematici di un'entità arbitraria con questo software.
- DART è un'applicazione multipiattaforma che può essere eseguita su tutti i principali sistemi, inclusi Windows, Ubuntu, FreeBSD, Mac OS e Archlinux.
- Supporta forme diverse come mesh concava, forme primitive e griglia di voxel probabilistica.
- Fornisce il supporto per la suddivisione della gestione dei vincoli tramite la tecnica "Isola" che offre prestazioni migliori.
8. Volo pulito
CleanFlight è uno dei software per controller di volo più popolari nei tempi moderni. È un progetto open source che supporta un'ampia gamma di componenti hardware. Gli utenti possono usarlo gratuitamente e contribuire anche al miglioramento di questo strumento.
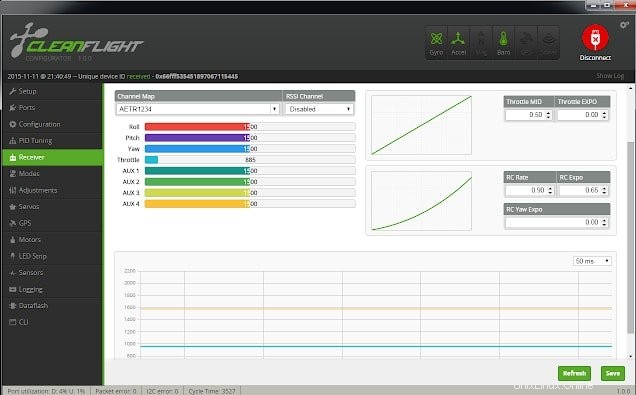
Caratteristiche degne di nota di Volo pulito
- Fornisce prestazioni di volo impressionanti con sicurezza rispetto a molti altri software correlati.
- Contiene una community attiva e amichevole su Facebook, Github e Twitter per ottenere feedback dagli utenti. Gli sviluppatori attivi cercano sempre di migliorare l'esperienza dell'utente.
- CleanFlight fornisce il codice comprensibile, ben testato e ben documentato in modo che l'ulteriore sviluppo possa essere più agevole.
- Ha anche una documentazione per l'utente aggiornata e utile per conoscere l'installazione e la configurazione dello strumento.
9. UAV dei paparazzi
Paparazzi UAV è un altro pacchetto software drone essenziale e gratuito per la comunità Linux. È anche un progetto open source sotto la GNU General Public License (v2). Molti sistemi di veicoli aerei senza pilota sono stati utilizzati per scopi di ricerca e professionali con l'aiuto di questo software.
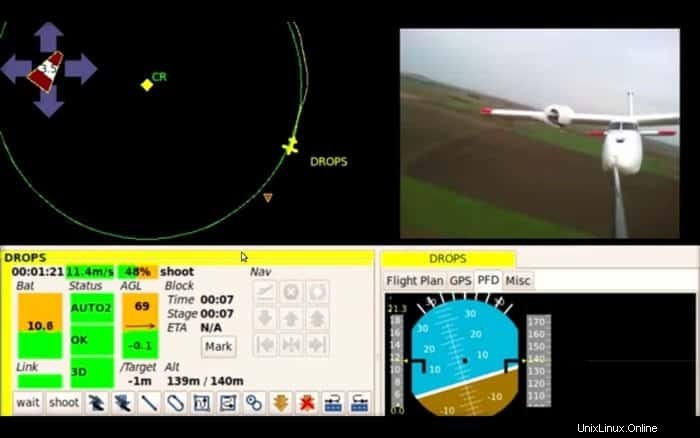
Caratteristiche degne di nota di UAV paparazzi
- Paparazzi ti consente di controllare la velocità di salita utilizzando l'acceleratore e il beccheggio.
- Fornisce codice sorgente e tutorial per configurare correttamente il tuo dispositivo.
- Altamente configurabile e compatibile con i tradizionali velivoli ad ala fissa e multicotteri.
- Può interfacciarsi con un'ampia gamma di sensori, tra cui pressione barometrica, sonar, temperatura e umidità e altro ancora.
10. ARGoS
ARGoS viene fornito con un simulatore di robot multifisico in grado di simulare sciami di robot su larga scala ad alte prestazioni. Questo sistema software per robot è rilasciato con licenza MIT. Fornisce diversi motori fisici e può eseguirli nello stesso esperimento. Inoltre, ti consente di aggiungere facilmente nuovi attuatori, robot, sensori e motori fisici con la sua interfaccia intuitiva.
Caratteristiche degne di nota di ARGoS
- Puoi personalizzare il progetto aggiungendo nuovi plugin per migliorare la funzionalità secondo le tue necessità.
- Fornisce il manuale dell'utente e dello sviluppatore con la documentazione adeguata per informare gli utenti in dettaglio.
- Questo è considerato uno strumento essenziale per aiutare nella ricerca e ottenere dati ottimizzati e accurati.
- Funziona su diverse piattaforme, tra cui Linux e Mac OS X.
11. ApriDroneMap
OpenDroneMap viene fornito con un toolkit da riga di comando che aiuta a generare mappe, nuvole di punti e DEM da un drone. È un ecosistema aperto per raccogliere ed elaborare i dati aerei con le sue straordinarie funzioni. OpenDroneMap è un prodotto open source con licenza GPLv3. Consente agli utenti di accedere alle sue funzioni tramite un'interfaccia web minima.

Caratteristiche degne di nota di ApriDroneMap
- Fornisce un'API user-friendly ed estendibile per visualizzare e archiviare le immagini senza problemi.
- Funziona su più piattaforme, tra cui Linux, Windows e Mac OS.
- Inoltre, fornisce una documentazione adeguata con le istruzioni di configurazione su diverse piattaforme.
12. LibrePilot
Dall'inizio di questo progetto nel 2015, LibrePilot ha funzionato per il miglioramento della ricerca e dello sviluppo della robotica e del controllo dei veicoli e della stabilizzazione. LibrePilot è scritto nei linguaggi di programmazione C e C++ dal team OpenPilot. Come la maggior parte dei progetti di cui sopra, funziona anche su sistemi Linux, Mac, Windows e Android.
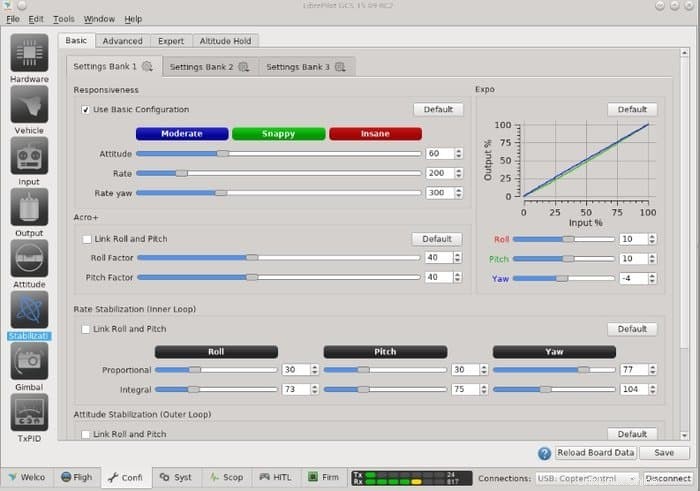
Caratteristiche degne di nota di Libre Pilot
- Supporta più protocolli di ingresso (PPM, PWM, DSM Sat, HoTT, ecc.) e uscite (PWM, OneShot125, OneShot42, PWMSync. ecc.).
- Ti consente di utilizzare diversi FlightController come Revolution, Sparky2, CC3D e altri.
- LibrePilot Supporta diversi protocolli di telemetria, inclusi MAVLINK e MSP.
- Fornisce il controllo per il decollo automatico, l'atterraggio automatico e il volo autonomo.
- Gli utenti possono lavorare con diverse modalità di volo. Può essere Atteggiamento, Manuale, Tasso e così via
13. dronin
dRonin è un software intuitivo e diretto per controllare quadricotteri e vari sistemi di piccoli aerei. Viene fornito con un'interfaccia facile da usare e ampiamente utilizzata. dRonin è un prodotto open source con licenza GPLv3 e anche gratuito da usare. È adatto principalmente a diversi tipi di corse e voli autonomi. Puoi usarlo come piattaforma ideale per micro controllori di volo con sensori di base.
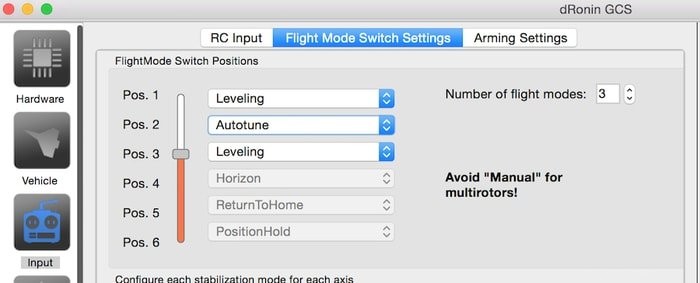
Caratteristiche degne di nota di dronin
- Fornisce un ambiente flessibile per far volare una macchina ben messa a punto attraverso la sua configurazione guidata e funzionalità.
- Supporta un sacco di hardware, tra cui Sparky, BrainFPV, DTF Seppuku e altro.
- Compatibile con un gran numero di robotica e accessori.
- Consente agli utenti di controllare vari aeroplani RC convenzionali, elicotteri, elicotteri e altro ancora.
- Fornisce una documentazione di facile comprensione e una community attiva su piattaforme social e professionali come Facebook e Github.
14. OpenRTM-aist
OpenRTM-aist viene fornito con una piattaforma software, in particolare per lo sviluppo di sistemi robotici. Il National Institute of Advanced Industrial Science and Technology ha sviluppato questo strumento basato su componenti RT. È scritto nei linguaggi C++, Java e Python.
Caratteristiche degne di nota di OpenRTM-aist
- Concesso in licenza sotto GNU Lesser General Public License e anche Eclipse Public License.
- Fornisce una documentazione chiara con le linee guida complete per l'installazione.
- OpenRTM-aist contiene una comunità attiva, tra cui un forum, una mailing list, formazione e concorsi.
- È un software multipiattaforma che supporta i sistemi Windows, Linux/Unix, Mac OS e FreeBSD.
- Fornisce un ambiente di comunicazione flessibile tra diversi RTC.
15. Codice drone
Dronecode è un pacchetto software per droni moderno e avanzato per startup accademiche, industriali e agili. Viene fornito con un progetto open source ospitato da The Linux Foundation con una vasta gamma di funzionalità flessibili. Dronecode è costruito con Python, Java e Objective C. Oltre a creare droni, può anche essere ampiamente utilizzato per la ricerca scientifica.

Caratteristiche degne di nota di Dronecode
- Fornisce una licenza BSD permissiva IP-friendly con governance neutra e trasparente.
- Un sistema flessibile per tutti i tipi di veicoli, inclusi VTOL, ad ala fissa, multielicottero e anche veicoli terrestri.
- Can be used in different purposes like surveying and inspections, racing, aerial photography, medical supply, and more.
- Supports high latency telemetry and structure scanning. Also, it provides the facility of wind estimator.
- Contains an active and friendly community that supports its users in almost every step.
- You can run Dronecode on different platforms, including Linux, Mac OS X, Windows, and Android.
16. URBI
Now, it’s time to let you know about another open source robotics platform, URBI. It refers to the Universal Robot Body Interface that is built to develop complex robotic applications. This platform is licensed under the GNU Affero General Public License. It provides a standard API that helps to describe various algorithms and sensors.
Noteworthy Features of URBI
- URBI provides an easy-to-use interface using C++ component library.
- It provides the facility of voice recognition, voice synthesis, face detection, and face recognition.
- You can also detect color blob using this platform.
- It is a scripted language that can access sensors, speakers, and other components of the robot.
17. ROS
ROS comes with a flexible and accessible framework to create modern robot applications, written in C++, Python, and Lisp languages. The full meaning of this tool refers to the Robot Operating System, which is entirely open source and released under the BSD license. Also, it provides internationalization support in different languages, including German, English, Italian, Korean, Brazilian, Thai, and more.
Noteworthy Features of ROS
- It brings with a wide range of tools and libraries to make the task of building sophisticated robots flexibly and securely.
- Provides strong support and tutorials to get step-by-step instructions to learn this tool properly.
- Compatible with major platforms like Linux, Mac OS, and Windows.
- Includes over 2000 software libraries, many useful APIs, and also a wide range of standard tools for developing and debugging purposes.
18. Fawkes
Fawkes comes with a robot software framework to create and run real-time robotic applications. This program is written in C++ programming language released under the GNU General Public License v2. It brings a complete package with clean structure and documentation in most of the professional areas. Also, it is free to use.
Noteworthy Features of Fawkes
- Provides a component-based approach to increase the efficiency of the application.
- Fawkes runs best on modern Linux and Unix systems, including Fedora and also on FreeBSD.
- Using hybrid blackboard system, it helps to make the communication without conflicting commands.
- It lets you use FireVision, an integrated computer vision framework which helps to transmit images over the network for visual debugging.
- Also, it provides a component-based design and compatible with a variety of platforms.
19. Rock
Rock is a specialized robotic software framework for Linux system, developed in C++ and Ruby languages by DFKI Robotics Innovation Center. It provides the facility of error detection, reporting, handling, and smoothly managing large systems. This Robot Construction Kit helps users to run reliable and high-performance robotic systems in different applications.
Noteworthy Features of Rock
- Rock provides a sustainable system to build modern robots.
- It lets you extend the functionality by adding new components in your robot.
- Complete tutorial package to let users create libraries, configure and connect components, installing packages, and more.
- It contains a flexible graphical user interface. Also, it provides 2D and 3D visualization support using QT-Framework and VizkitWidget.
20. CARMEN
CARMEN, an open source collection of a robot software framework, refers to Carnegie Mellon Robot Navigation Toolkit. Carnegie Mellon University developed this application aims to sensor control, obstacle avoidance, logging, and path planning. Though it is written in C language, it can also provide Java support.
Noteworthy Features of CARMEN
- A proper toolkit for Linux platform under General Public License.
- It supports various hardware, including iRobot ATRV, ActiveMedia Pioneer 1 and 2, OrcBoard, Segway, and more.
- CARMEN provides the facility of localization, scan-matching, and a mapping module.
- Also, it supports different sensors like the SICK LMS laser measurement system, Sonar, Hokuyo IR, and more.
- Provides complete documentation with download and installation process.
Wrap Up
So, it’s time to finish up our discussion on finding the drone and robot software for Linux system. We tried to sort out the most popular and user-friendly applications for our users so far. From the software mentioned above, you will find most of them as open source and free to use. Besides these, let us know if you have any other choices.
Finally, you are requested to share this article with your beloved communities to let other people know about this. Thanks for your valuable time.